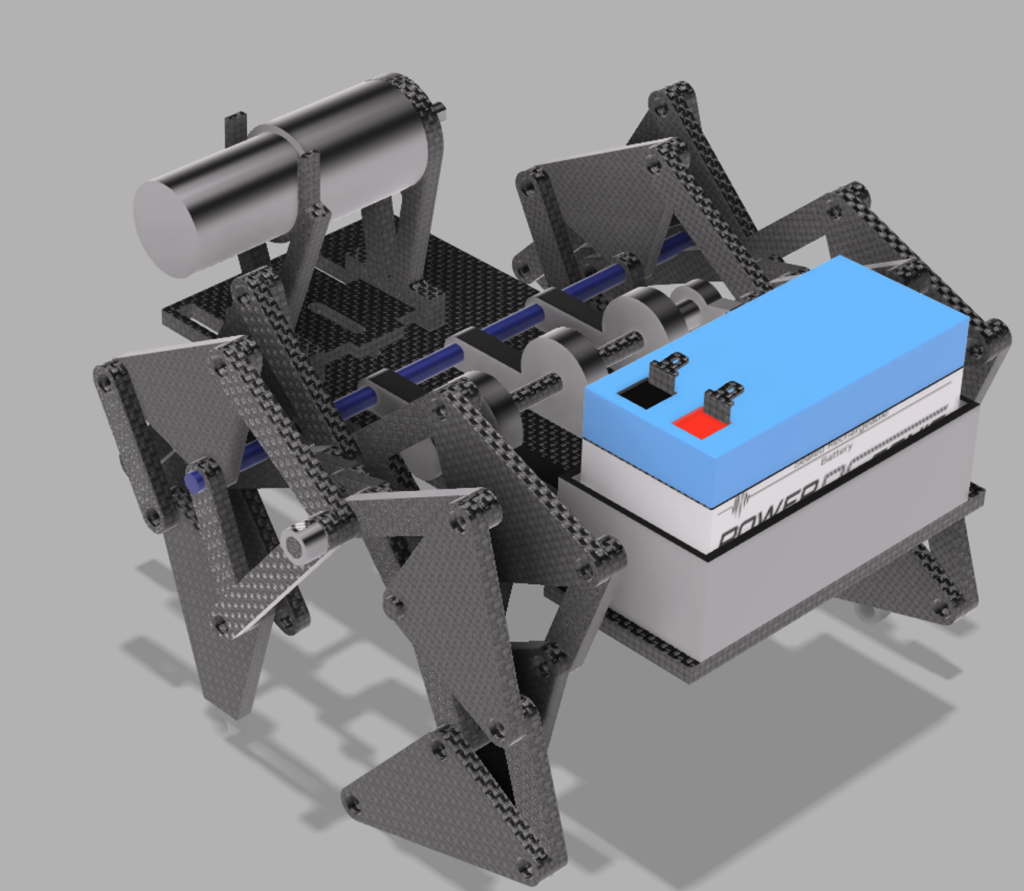
Réalisé en groupe de trois, ce projet a nécessité une bonne coordination. En tant qu’animateur, j’ai organisé la répartition des tâches (support batterie, châssis, axes) pour que nous puissions avancer en parallèle. Pour la base mécanique, nous avons sélectionné et adapté le modèle cinématique des pattes de Theo Jansen, que nous avons entièrement modélisé et animé sur Fusion 360.